








 It’s Only Common Sense: OCCAM—the Time Is Now
It’s Only Common Sense: OCCAM—the Time Is Now Marcy's Musings: The Growing Industry
Marcy's Musings: The Growing Industry Dan’s Biz Bookshelf: Seeing the How
Dan’s Biz Bookshelf: Seeing the HowResearchers Control Soft Robots Using Magnetic Fields
March 30, 2017 | NC State UniversityEstimated reading time: 2 minutes
A team of engineering researchers has made a fundamental advance in controlling so-called soft robots, using magnetic fields to remotely manipulate microparticle chains embedded in soft robotic devices. The researchers have already created several devices that make use of the new technique.
“By putting these self-assembling chains into soft robots, we are able to have them perform more complex functions while still retaining relatively simple designs,” says Joe Tracy, an associate professor of materials science and engineering at North Carolina State University and corresponding author of a paper on the work. “Possible applications for these devices range from remotely triggered pumps for drug delivery to the development of remotely deployable structures.”
The new technique builds on previous work in the field of self-assembling, magnetically actuated composites by Tracy and Orlin Velev, the INVISTA Professor of Chemical and Biomolecular Engineering at NC State.
For this study, the researchers introduced iron microparticles into a liquid polymer mixture and then applied a magnetic field to induce the microparticles to form parallel chains. The mixture was then dried, leaving behind an elastic polymer thin film embedded with the aligned chains of magnetic particles.
“The chains allow us to manipulate the polymer remotely as a soft robot by controlling a magnetic field that affects the chains of magnetic particles,” Tracy says.
Specifically, the direction of the magnetic field and its strength can be varied. The chains of iron microparticles respond by aligning themselves and the surrounding polymer in the same direction as the applied magnetic field.
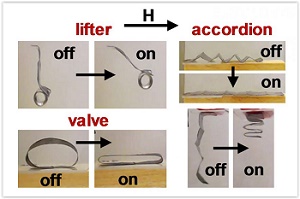
Using this technique, the researchers have created three kinds of soft robots. One device is a cantilever that can lift up to 50 times its own weight. The second device is an accordion-like structure that expands and contracts, mimicking the behavior of muscle. The third device is a tube that is designed to function as a peristaltic pump – a compressed section travels down the length of the tube, much like someone squeezing out the last bit of toothpaste by running their finger along the tube.
“We’re now working to improve both the control and the power of these devices, to advance the potential of soft robotics,” Tracy says.
The researchers have also developed a metric for assessing the performance of magnetic lifters, such as the cantilever device.
“We do this by measuring the amount of weight being lifted and taking into account both the mass of particles in the lifter and the strength of the magnetic field being applied,” says Ben Evans, co-author of the paper and an associate professor of physics at Elon University. “We think this is a useful tool for researchers in this area who want to find an empirical way to compare the performance of different devices.”
Share on:




Suggested Items
Nanotechnology Market to Surpass $53.51 Billion by 2031
04/25/2024 | PRNewswireSkyQuest projects that the nanotechnology market will attain a value of USD 53.51 billion by 2031, with a CAGR of 36.4% over the forecast period (2024-2031).
DOCOMO, NTT, NEC and Fujitsu Develop Top-level Sub-terahertz 6G Device
04/12/2024 | JCN NewswireNTT DOCOMO, INC., NTT Corporation, NEC Corporation and Fujitsu Limited jointly announced today the development of a top-level (1) wireless device capable of ultra-high-speed 100 Gbps transmissions in the 100 GHz and 300 GHz sub-terahertz bands.
Scientists Propose a New Way to Search for Dark Matter
04/02/2024 | SLAC National Accelerator LaboratoryEver since its discovery, dark matter has remained invisible to scientists, despite the launch of multiple ultra-sensitive particle detector experiments around the world over several decades.
INSPECTIS Offers Slider Plate Stand for Optical Inspection
04/01/2024 | INSPECTISINSPECTIS introduces a new specialized slider stand capability for repetitive optical inspection tasks, for example, for the production of special devices such as stents.
Ambiq Apollo510 Delivers 30x Power Efficiency Improvement to Unleash Endpoint AI
03/27/2024 | AmbiqAmbiq, a technology leader in exceptionally energy-efficient semiconductors for IoT devices, is introducing the new Apollo510, the first member of the Apollo5 SoC family, which is uniquely positioned to kickstart the age of truly ubiquitous, practical, and meaningful AI.