








 It’s Only Common Sense: OCCAM—the Time Is Now
It’s Only Common Sense: OCCAM—the Time Is Now Marcy's Musings: The Growing Industry
Marcy's Musings: The Growing Industry Dan’s Biz Bookshelf: Seeing the How
Dan’s Biz Bookshelf: Seeing the HowOn the Origin of (Robot) Species
August 14, 2015 | University of CambridgeEstimated reading time: 4 minutes
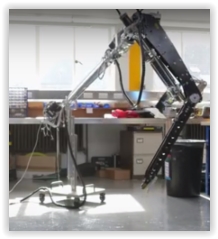
Researchers have observed the process of evolution by natural selection at work in robots, by constructing a ‘mother’ robot that can design, build and test its own ‘children’, and then use the results to improve the performance of the next generation, without relying on computer simulation or human intervention.
Researchers led by the University of Cambridge have built a mother robot that can independently build its own children and test which one does best; and then use the results to inform the design of the next generation, so that preferential traits are passed down from one generation to the next.
Without any human intervention or computer simulation beyond the initial command to build a robot capable of movement, the mother created children constructed of between one and five plastic cubes with a small motor inside.
In each of five separate experiments, the mother designed, built and tested generations of ten children, using the information gathered from one generation to inform the design of the next. The results, reported in the open access journal PLOS One, found that preferential traits were passed down through generations, so that the ‘fittest’ individuals in the last generation performed a set task twice as quickly as the fittest individuals in the first generation.
“Natural selection is basically reproduction, assessment, reproduction, assessment and so on,” said lead researcher Dr Fumiya Iida of Cambridge’s Department of Engineering, who worked in collaboration with researchers at ETH Zurich. “That’s essentially what this robot is doing – we can actually watch the improvement and diversification of the species.”
For each robot child, there is a unique ‘genome’ made up of a combination of between one and five different genes, which contains all of the information about the child’s shape, construction and motor commands. As in nature, evolution in robots takes place through ‘mutation’, where components of one gene are modified or single genes are added or deleted, and ‘crossover’, where a new genome is formed by merging genes from two individuals.
In order for the mother to determine which children were the fittest, each child was tested on how far it travelled from its starting position in a given amount of time. The most successful individuals in each generation remained unchanged in the next generation in order to preserve their abilities, while mutation and crossover were introduced in the less successful children.
The researchers found that design variations emerged and performance improved over time: the fastest individuals in the last generation moved at an average speed that was more than twice the average speed of the fastest individuals in the first generation. This increase in performance was not only due to the fine-tuning of design parameters, but also because the mother was able to invent new shapes and gait patterns for the children over time, including some designs that a human designer would not have been able to build.
“One of the big questions in biology is how intelligence came about – we’re using robotics to explore this mystery,” said Iida. “We think of robots as performing repetitive tasks, and they’re typically designed for mass production instead of mass customisation, but we want to see robots that are capable of innovation and creativity.”
In nature, organisms are able to adapt their physical characteristics to their environment over time. These adaptations allow biological organisms to survive in a wide variety of different environments – allowing animals to make the move from living in the water to living on land, for instance.
But machines are not adaptable in the same way. They are essentially stuck in one shape for their entire ‘lives’, and it’s uncertain whether changing their shape would make them more adaptable to changing environments.
Evolutionary robotics is a growing field which allows for the creation of autonomous robots without human intervention. Most work in this field is done using computer simulation. Although computer simulations allow researchers to test thousands or even millions of possible solutions, this often results in a ‘reality gap’ – a mismatch between simulated and real-world behaviour.
While using a computer simulation to study artificial evolution generates thousands, or even millions, of possibilities in a short amount of time, the researchers found that having the robot generate its own possibilities, without any computer simulation, resulted in more successful children. The disadvantage is that it takes time: each child took the robot about 10 minutes to design, build and test. According to Iida, in future they might use a computer simulation to pre-select the most promising candidates, and use real-world models for actual testing.
Iida’s research looks at how robotics can be improved by taking inspiration from nature, whether that’s learning about intelligence, or finding ways to improve robotic locomotion. A robot requires between ten and 100 times more energy than an animal to do the same thing. Iida’s lab is filled with a wide array of hopping robots, which may take their inspiration from grasshoppers, humans or even dinosaurs. One of his group’s developments, the ‘Chairless Chair’, is a wearable device that allows users to lock their knee joints and ‘sit’ anywhere, without the need for a chair.
“It’s still a long way to go before we’ll have robots that look, act and think like us,” said Iida. “But what we do have are a lot of enabling technologies that will help us import some aspects of biology to the engineering world.”
Share on:




Suggested Items
Cadence, TSMC Collaborate on Wide-Ranging Innovations to Transform System and Semiconductor Design
04/25/2024 | Cadence Design SystemsCadence Design Systems, Inc. and TSMC have extended their longstanding collaboration by announcing a broad range of innovative technology advancements to accelerate design, including developments ranging from 3D-IC and advanced process nodes to design IP and photonics.
Ansys, TSMC Enable a Multiphysics Platform for Optics and Photonics, Addressing Needs of AI, HPC Silicon Systems
04/25/2024 | PRNewswireAnsys announced a collaboration with TSMC on multiphysics software for TSMC's Compact Universal Photonic Engines (COUPE). COUPE is a cutting-edge Silicon Photonics (SiPh) integration system and Co-Packaged Optics platform that mitigates coupling loss while significantly accelerating chip-to-chip and machine-to-machine communication.
Siemens’ Breakthrough Veloce CS Transforms Emulation and Prototyping with Three Novel Products
04/24/2024 | Siemens Digital Industries SoftwareSiemens Digital Industries Software launched the Veloce™ CS hardware-assisted verification and validation system. In a first for the EDA (Electronic Design Automation) industry, Veloce CS incorporates hardware emulation, enterprise prototyping and software prototyping and is built on two highly advanced integrated circuits (ICs) – Siemens’ new, purpose-built Crystal accelerator chip for emulation and the AMD Versal™ Premium VP1902 FPGA adaptive SoC (System-on-a-chip) for enterprise and software prototyping.
Listen Up! The Intricacies of PCB Drilling Detailed in New Podcast Episode
04/25/2024 | I-Connect007In episode 5 of the podcast series, On the Line With: Designing for Reality, Nolan Johnson and Matt Stevenson continue down the manufacturing process, this time focusing on the post-lamination drilling process for PCBs. Matt and Nolan delve into the intricacies of the PCB drilling process, highlighting the importance of hole quality, drill parameters, and design optimization to ensure smooth manufacturing. The conversation covers topics such as drill bit sizes, aspect ratios, vias, challenges in drilling, and ways to enhance efficiency in the drilling department.
Elevating PCB Design Engineering With IPC Programs
04/24/2024 | Cory Blaylock, IPCIn a monumental stride for the electronics manufacturing industry, IPC has successfully championed the recognition of the PCB Design Engineer as an official occupation by the U.S. Department of Labor (DOL). This pivotal achievement not only underscores the critical role of PCB design engineers within the technology landscape, but also marks the beginning of a transformative journey toward nurturing a robust, skilled workforce ready to propel our industry into the future.